Blokschema van de robotmaaier
Overzicht blokschema
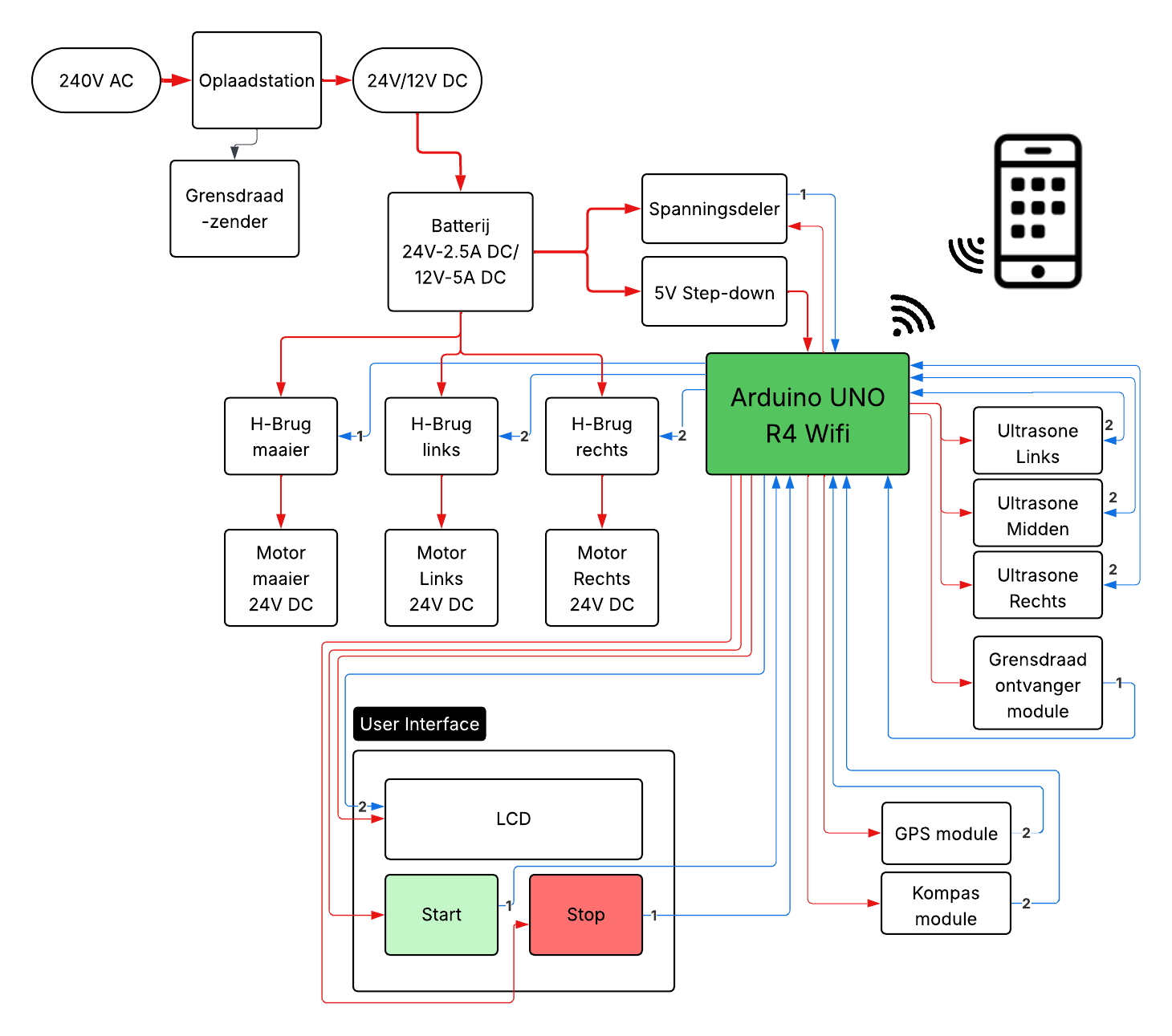
De robotmaaier bestaat uit verschillende functionele blokken die samenwerken. Het blokschema geeft een overzicht van de signaal- en energiestromen binnen het systeem. Verdere uitleg over de werking kan je onder het schema vinden.
Uitleg eindwerk robotmaaier
We starten bij 240V AC uit het stopcontact, deze gaat direct naar het laadstation en vormen we in het laadstation om naar een lagere spanning (24V DC of 12V DC afhankelijk van later onderzoek, hoe sterk de motoren en batterij moeten zijn, en aan de hand van eventueel beschikbare componenten). Vanuit het laadstation is ook de basis voor het uitzenden van het signaal over de grensdraad.
De omgevormde DC spanning gaat via een contact tussen de robot en het laadstation naar de batterij. De batterij is direct gekoppeld aan 3 H-bruggen die de 2 wielmotoren voeden, en de motor voor het maaimes.
Aan de batterij is ook een 5V step-down gekoppeld voor het voeden van de Arduino (UNO R4 Wifi) en er is ook een spanningsdeler voorzien tussen de batterij en de Arduino, die de Arduino in staat stelt om het batterijpercentage te berekenen.
De Arduino gaan we zo programmeren dat de robotmaaier in een willekeurig patroon rijdt tussen het (door grensdraad) afgebakende deel. Deze stuurt dan ook de motoren aan via de H-bruggen. Het maaimes heeft 2 inputs (PWM en signaal voor start). De rijmotoren hebben 2 signaaldraden voor vooruit en achteruit, en hebben voorlopig geen PWM regeling nodig.
Buiten de H-bruggen is er nog 1 output en dit is de LCD voorzien in de user interface. Deze gaat de gebruiker voorzien van informatie als foutcodes en batterijpercentage. Verder in de user interface zijn ook een start- en stopdrukknop voorzien voor het starten en stoppen van de robot.
Om de robot zo vlot mogelijk te laten rondrijden is deze voorzien van 4 sensoren. Natuurlijk de grensdraadontvanger module en daarnaast ook nog 3 ultrasone sensoren. Deze detecteren wanneer de robot dicht bij een obstakel komt en laat deze dan indien nodig ook bijsturen.
Input, verwerking en output
Input
- Grensdraadontvanger module
- Drie ultrasone sensoren voor obstakeldetectie
- Start- en stopdrukknoppen
Verwerking
De microcontroller verwerkt alle binnenkomende signalen van de sensoren en gebruikersinput. Op basis hiervan bepaalt het programma de rijrichting, snelheid en acties van de robotmaaier.
Output
- Aansturing van de wielmotoren via H-bruggen
- Aansturing van de maaimotor
- Weergave van informatie via het LCD-scherm
Toelichting van de afzonderlijke blokken
Hieronder worden de belangrijkste blokken nog kort afzonderlijk toegelicht.
- H-brug: stuurt de motoren aan en bepaalt hun draairichting en snelheid.
- Ultrasone zender-ontvanger: meet de afstand tot obstakels zodat de robot kan bijsturen.
- Grensdraadontvanger: detecteert het signaal van de grensdraad en begrenst het maaigebied.
- LCD-module: toont informatie zoals foutcodes en batterijpercentage aan de gebruiker.
- GPS-module: maakt nauwkeurigere rijpatronen mogelijk in latere uitbreidingen.
- Kompas-module: bepaalt de rijrichting van de robot voor betere precisie.
- Spanningsdeler: laat de Arduino toe om de batterijspanning veilig te meten.